Run the Simulation
1. Run LinkExampleSimulation.
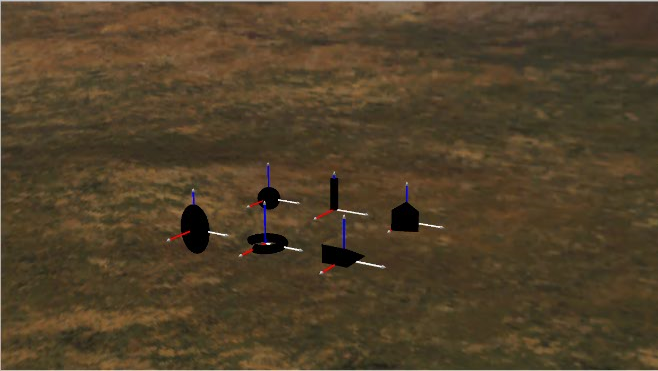
You should get a view resembling that of the figure below.
2. Modify the values of the parameters of some of the shapes
For example, try modifying the value of the sphere:
private static final double SPHERE_R = 0.15;
Notice how it changes the shape.
Try modifying the other shapes as well and notice how their size and proportions change with each value.
3. Try modifying the space set between each shape relative to each shape.
The origin of each coordinate system is at the origin of each shape.
Try modifying the OFFSET and COORD_LENGTH values.
The parameters passed into translate(OFFSET, 1.0, 0.0) within the exampleShapes() method will change the placement of the shape that calls the translate() method.
4. Add rotations and more translation and notice their effects.
In order to add rotations you have to use the built in linkGraphics.rotate(double rotAng, int rotAxis) method.
Make sure that you import us.ihmc.robotics.Axis in order to use the rotate method.
Try testing this method out on some of your already created shapes. Notice how they are effected.
For more information you can look at the LinkGraphicsDescription API Page.
5. Try creating some shapes with different appearances
To change the appearance of some of the shapes take a look at the YoAppearance Utility API.
6. Try experimenting to make an object, such as a snowman, out of the shapes.
Try to create a snowman that looks like the image below.

Snowman example code
package us.ihmc.exampleSimulations.linkExamples;
import us.ihmc.graphicsDescription.appearance.YoAppearance;
import us.ihmc.robotics.robotDescription.LinkGraphicsDescription;
import us.ihmc.simulationconstructionset.Link;
import us.ihmc.simulationconstructionset.Robot;
import us.ihmc.simulationconstructionset.SimulationConstructionSet;
public class LinkExamplesSimulation
{
private SimulationConstructionSet sim;
private static final double SPHERE_R = 0.15;
private static final double OFFSET = 1.5, COORD_LENGTH = 0.5;
public LinkExamplesSimulation()
{
Robot nullRob = null;
sim = new SimulationConstructionSet(nullRob);
// position the camera to view links
sim.setCameraPosition(10.0, 6.0, 3.0);
sim.setCameraFix(0.5, 0.5, 0.0);
Link exampleShapes = exampleShapes();
sim.addStaticLink(exampleShapes);
sim.setGroundVisible(false);
Thread myThread = new Thread(sim);
myThread.start();
}
public static void main(String[] args)
{
new LinkExamplesSimulation();
}
private Link exampleShapes()
{
Link ret = new Link("example shapes");
LinkGraphicsDescription linkGraphics = new LinkGraphicsDescription();
// Sphere
linkGraphics.translate(0.0 * OFFSET, 0.0, 0.0);
linkGraphics.addCoordinateSystem(COORD_LENGTH);
linkGraphics.addSphere(SPHERE_R + 0.1, YoAppearance.White());
linkGraphics.translate(0.0 * OFFSET, 0.0, -0.6);
linkGraphics.addCoordinateSystem(COORD_LENGTH);
linkGraphics.addSphere(SPHERE_R + 0.3, YoAppearance.White());
linkGraphics.translate(0.0 * OFFSET, 0.0, -0.9);
linkGraphics.addCoordinateSystem(COORD_LENGTH);
linkGraphics.addSphere(SPHERE_R + 0.55, YoAppearance.White());
ret.setLinkGraphics(linkGraphics);
return ret;
}
}