Run ValkyrieDemo
Once your program launches you should see the SCS Splash Screen, followed by the Valkyrie simulation. Click the Simulate button. Valkyrie should settle and balance in a standing position.
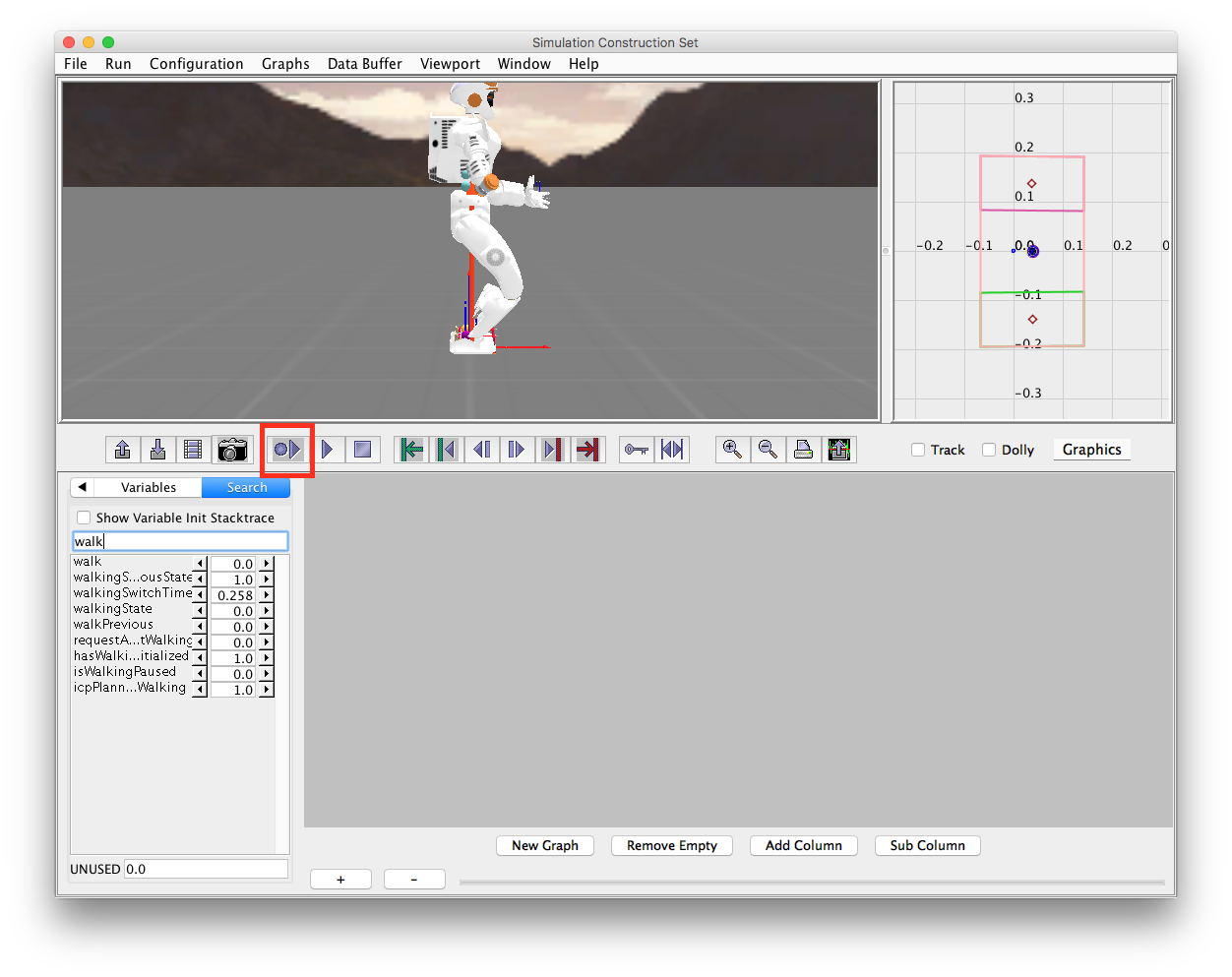
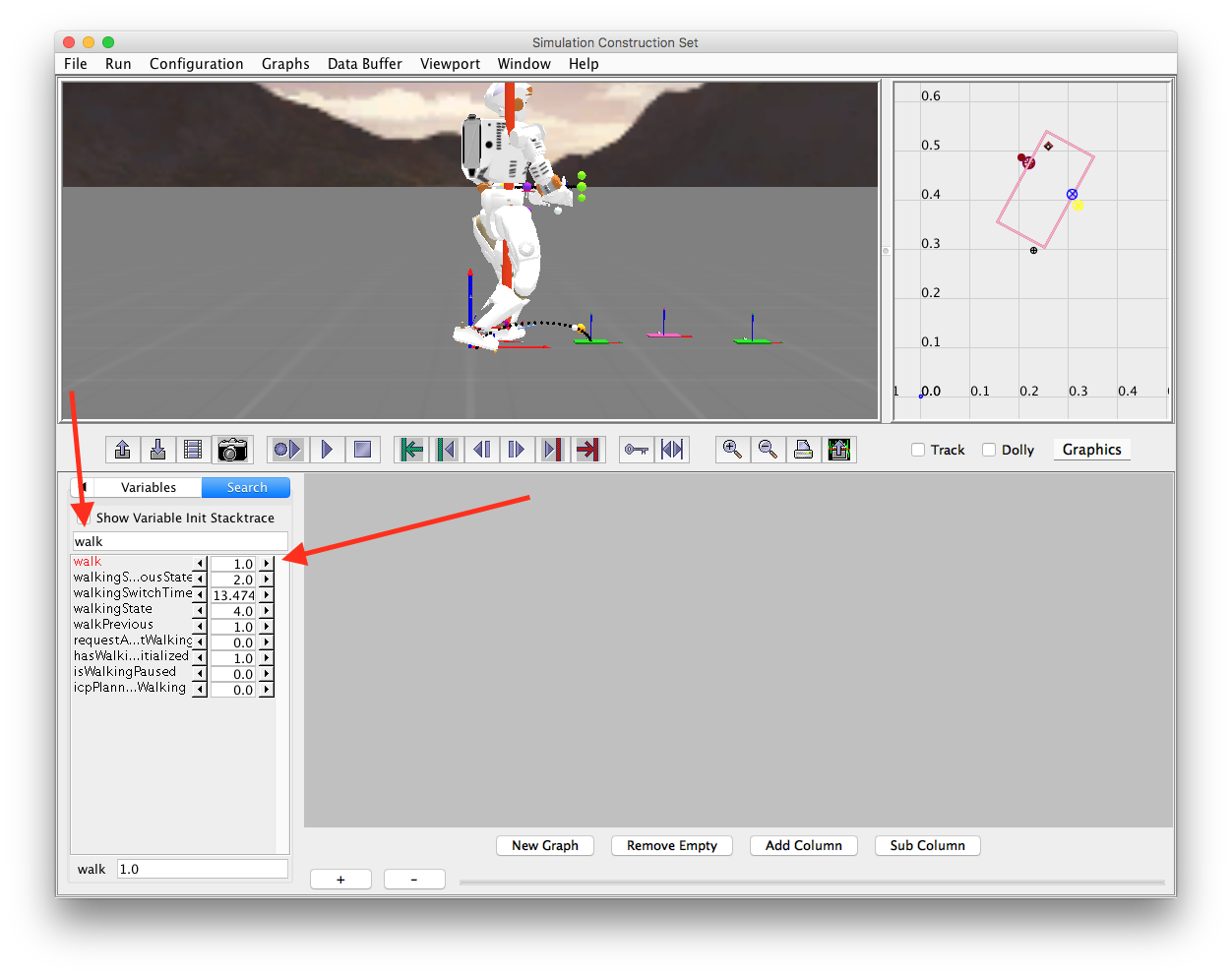
To make Valkyrie walk, type "walk" in the Variable search field. Find the variable named "walk", and set it's value to "1.0". If Valkyrie does not start walking, click the Simulate button, and Valkyrie should begin the flat ground walking track script. Congratulations! Everything is installed correctly!
If the simulation 'crashes', you will need to quit it and restart from your IDE.
For a more detailed explanation of Gradle Projects, IHMC Robotics Libraries, and SCS, see the Documentation pages.